© William Sellers (2021)




Welcome to ASL
Reanimating the dead
Working to understand how animals move
using biomechanical models
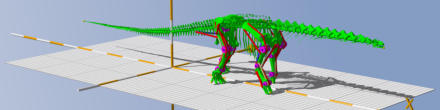
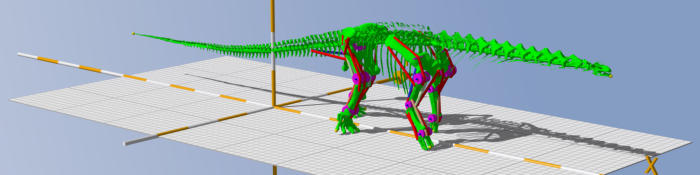
Animals achieve amazingly good performance using very little energy and trying to understand how they do it is a fascinating question. We get our initial information from watching and measuring the individual performances of living animals and then we build computer simulations that attempt to achieve the same things. If we can make the “digital twin” behave like the original then there is a good chance we have got something right and that really helps understand what is going on under the hood. We use a combination of physics-based models and machine learning to try and work out the best way of getting the performance we want, and because this is all done in a computer we can experiment with all the different options very quickly. At the same time we can use exactly the same techniques to try and reconstruct how extinct animals may have moved. We can reconstruct the morphology and then use the computer simulation to explore what the animal was capable of. So we can build a dinosaur model based on a skeleton in a museum and then use machine learning to generate walking and running to see how fast the animal could have gone which helps us learn about its lifestyle and habits.
Code on GitHub
To keep things a bit more managable we have moved all our code and models on to GitHub. The recent code is regularly tested and should be usable. Some of the older stuff will need quite a bit of work to get going.












© William Sellers (2021)
Welcome to ASL
Reanimating the dead
Working to understand how animals move
using biomechanical models
Animals achieve amazingly good performance using very little energy and trying to understand how they do it is a fascinating question. We get our initial information from watching and measuring the individual performances of living animals and then we build computer simulations that attempt to achieve the same things. If we can make the “digital twin” behave like the original then there is a good chance we have got something right and that really helps understand what is going on under the hood. We use a combination of physics-based models and machine learning to try and work out the best way of getting the performance we want, and because this is all done in a computer we can experiment with all the different options very quickly. At the same time we can use exactly the same techniques to try and reconstruct how extinct animals may have moved. We can reconstruct the morphology and then use the computer simulation to explore what the animal was capable of. So we can build a dinosaur model based on a skeleton in a museum and then use machine learning to generate walking and running to see how fast the animal could have gone which helps us learn about its lifestyle and habits.
Code on GitHub
To keep things a bit more managable we have moved all our code and models on to GitHub. The recent code is regularly tested and should be usable. Some of the older stuff will need quite a bit of work to get going.